The shape of Earth is very close to a sphere with radius of about 6378 km. Therefore, the geometrical model of Earth is reasonably given by the surface of a sphere in our 2D climate model.
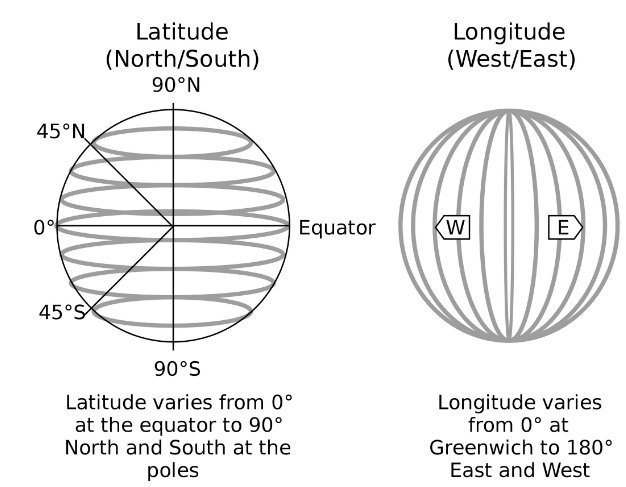
There are several conventions for spherical coordinates. In the geographic coordinate system, we speak of latitude/colatitude and longitude:
Latitude (θ): North-south direction. Latitude lines are parallel to the equator and are assigned the angle from the equator.
Colatitude (θ~): Complementary angle from a given latitude (meassured from the north pole).
Location
Latitude
Colatitude
North pole
90°
0°
Equator
0°
90°
South pole
-90°
180°
Longitude (φ): East-West direction. Longitude lines are perpendicular to the equator with range West -180° to East +180°.
Latitude and Longitude. Source: Wikipedia, Public Domain.
Remark 1: The values of longitude and latitude can be given in radians or degrees.
Remark 2: In geography, the generation of a map with long/lat values of a location always depends on the choice of a reference system: the so-called geodetic datum. The geodetic datum is a reference ellipsoid. Only in combination (map+geodetic datum) the coordinates are precise and can be compared.
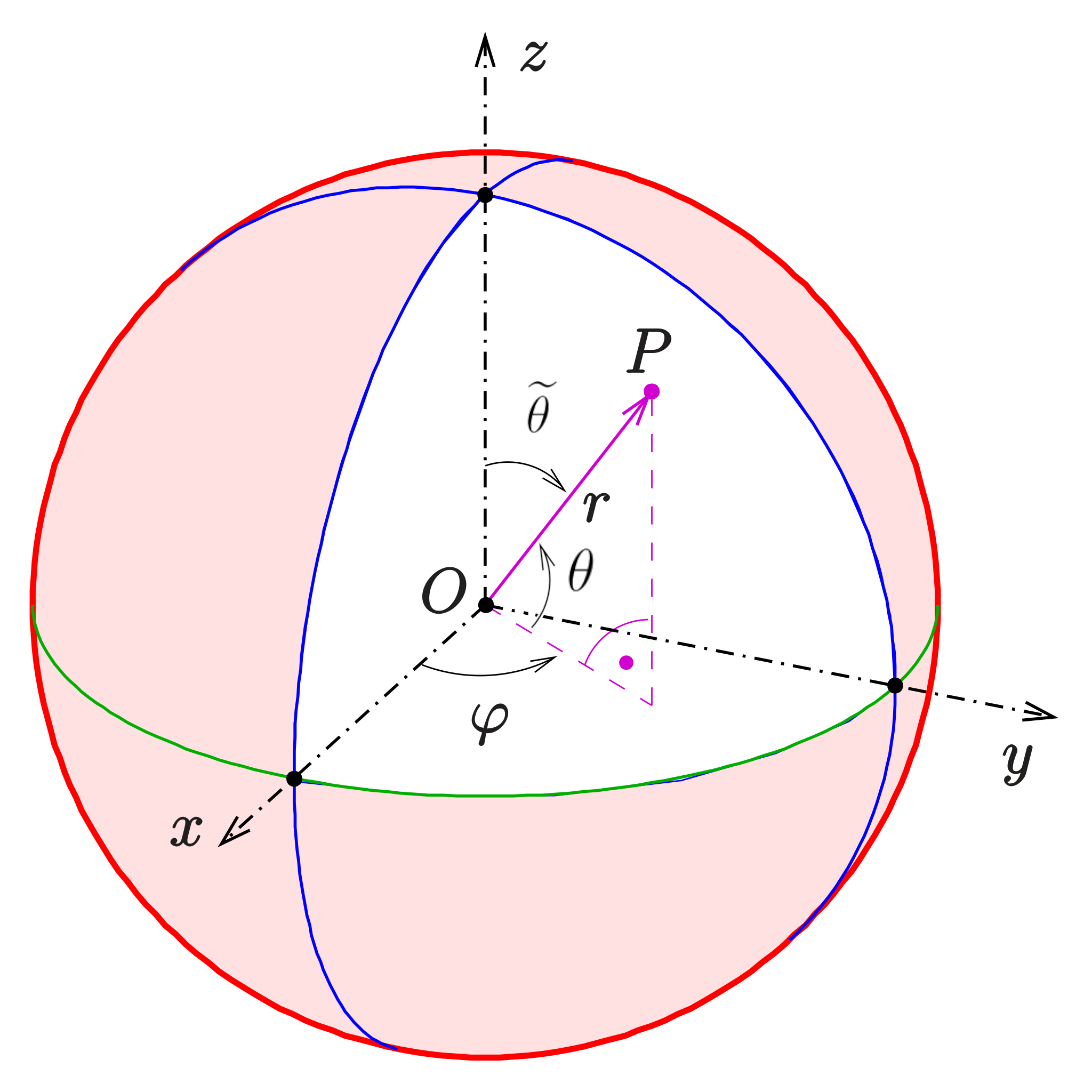
We consider the spherical coordinate system, in which all points in the three-dimensional space can be located using three variables:
Radius (r∈R,0≤r<∞),
Latitude (θ∈R,−π/2≤θ<π/2) or colatitude (θ~∈R,0≤θ~<π),
Example: The coordinate transformation can be used to compute the volume of a sphere with radius R: ∭VdV=∭Vdxdydz=∫r=0R∫θ~=0π∫φ=02π∣J∣drdθ~dφ=34πR3
{kind=link}
{kind=link}